
Von der kühnen Idee zur europaweiten Pflicht: 20 Jahre ESP
Im März 1995 hat Mercedes-Benz das Elektronische Stabilitäts-Programm ESP eingeführt – seit November 2011 ist ESP Vorschrift für neue Pkw in Europa.
Mit ABS (1978) und der Antriebsschlupf-Regelung ASR (1985) hatte Mercedes-Benz erstmals mit elektronischen Systemen begonnen, fahrdynamische Prozesse zu regeln. 1995 folgte der nächste Schritt: Zusätzliche Sensoren, die den Richtungswunsch des Fahrers (Lenkwinkelsensor) erkennen und ob das Auto seitlich wegrutscht (Querbeschleunigungssensor) oder dabei ist, sich um die eigene Hochachse zu drehen (Gierwinkelsensor), bilden die Grundlage für das elektronische Stabilitäts-Programm ESP. Ab März ist die Weltneuheit serienmäßig im Coupé S 600 (C 140). Wenige Monate später folgt der Einsatz in der Limousine der S-Klasse (W 140) und im SL-Roadster (R 129). Die V12-Modelle erhalten das Sicherheitssystem serienmäßig, für die V8‑Modelle dieser Baureihen ist es zunächst optional lieferbar.

Der „Elchtest“ bringt ESP in die A-Klasse
Die rasante Verbreitung der Sicherheitstechnologie beginnt indes 1997: Ein schwedischer Autotester überschreitet den fahrdynamischen Grenzbereich und wirft bei einem abrupten Ausweichmanöver („Elchtest“) die neue A‑Klasse um. Was zunächst wie ein Rückschlag für Mercedes-Benz wirkt, wird zum Triumph: Konsequent macht das Unternehmen ESP 1997 zum Serienstandard – zunächst für die A-Klasse, dann für alle Modelle. Alle anderen Hersteller müssen nachziehen – seit November 2011 müssen alle in der EU neu zugelassenen Pkw- und leichte Nutzfahrzeug-Modelle serienmäßig mit ESP ausgestattet werden.

Unterstützung in kritischen Situationen: So funktioniert ESP
ESP hilft dem Fahrer in Situationen, in denen er die Beherrschung seines Fahrzeugs zu verlieren droht. Erkennt es eine fahrdynamisch kritische Situation, bremst es je nach Situation und Bedarf ein Rad oder mehrere Räder gezielt ab. Zusätzlich wird, falls vom System als notwendig erkannt, automatisch das Motordrehmoment angepasst. So unterstützt ESP den Fahrer dabei, das Fahrzeug wieder zu stabilisieren – besonders in Kurven und bei plötzlichen Ausweichmanövern.

Herzstück des Stabilitätsprogramms ist ein Giergeschwindigkeitsmesser. Er verfolgt ständig die Bewegung des Fahrzeugs um seine Hochachse und vergleicht den gemessenen Ist-Wert mit dem Soll-Wert, der sich aus der Lenkvorgabe des Fahrers und der Geschwindigkeit ergibt. Sobald das Fahrzeug von dieser Ideallinie abweicht, greift ESP ein und beeinflusst Schleuderbewegungen schon beim Entstehen.
Sanfter Eingriff, neue Funktionen: So hat sich ESP weiterentwickelt
Schnellerer und feiner dosierter Aufbau des Bremsdrucks, höhere Rechenleistung der Steuergeräte, kompaktere Komponenten, neue Algorithmen – in zwei Jahrzehnten wurde ESP ständig weiterentwickelt. Ein wichtiger Meilenstein war die Einführung elektrischer Servolenkungen: Waren bis dahin nur Bremseingriffe und die Reduzierung des Motordrehmoments möglich, so helfen ab 2005 auch Lenkeingriffe bei der Stabilisierung des Fahrzeugs.
Am spürbarsten für Autofahrer ist der Fortschritt jedoch bei der Abstimmung des ESP Systems: Regelte die Elektronik die erste A-Klasse noch radikal bis zum Beinahe-Stillstand herunter, greift ESP mittlerweile sehr behutsam ein und hält das Fahrzeug mit minimalem Tempoverlust auf der Fahrbahn.
ESP hat mittlerweile zudem zahlreiche Unterfunktionen und dient als Basis für weitere Assistenzsysteme. Hier ein alphabetisch sortierter Überblick:
- ADAPTIVE BRAKE: erweitert die Funktionen des ESP® um eine komfortable Berganfahrhilfe und die HOLD-Funktion, die im Stillstand ungewolltes Vor- oder Zurückrollen automatisch verhindert.
- Aktiver Spurhalte-Assistent: korrigiert bei unbeabsichtigtem Spurwechsel beim Überfahren von durchgezogenen Linien und bei erkannter Kollisionsgefahr durch belegte Nachbarspur auch beim Überfahren unterbrochener Linien mit einem einseitigen Bremseingriff über ESP® die Spur.
- Aktiver Totwinkel-Assistent: kann im letzten Moment durch einseitigen Bremseingriff dazu beitragen, eine drohende seitliche Kollision abzuwenden oder die Unfallschwere zu reduzieren.
- Anhängerstabilisierung: dämpft bei Bedarf die Pendelschwingung aktiv mit Hilfe radindividueller, wechselseitiger Bremseingriffe an der Vorderachse bzw. verlangsamt das Zugfahrzeug bei kritischer Geschwindigkeit.
- Bergabfahrhilfe DSR (Downhill Speed Regulation): Bei anspruchsvollen Bergab-Passagen kann eine langsame, manuell einstellbare Fahrgeschwindigkeit eingehalten werden. Dies geschieht mit Hilfe der Motor- und Getriebesteuerung sowie gezielten Bremseingriffen.
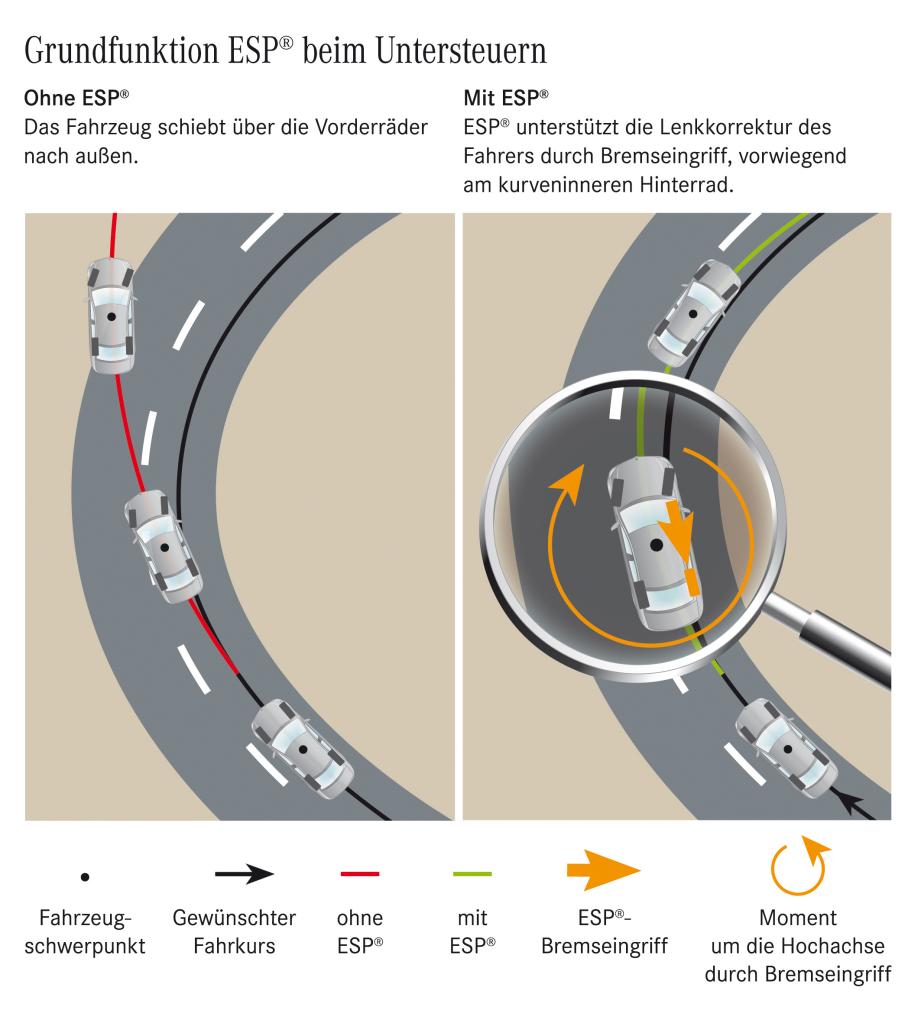
- Kurvendynamik-Assistent: Registrieren die ESP Sensoren die Tendenz zum Untersteuern, erzeugt das Stabilitätsprogramm einen gezielten Bremseingriff am kurveninneren Hinterrad. Dadurch entsteht eine sanfte Drehbewegung des Fahrzeugs um die Hochachse.
- Seitenwind-Assistent: kann Spurabweichung über einseitigen ESP® Eingriff kompensieren (bei Fahrzeugen ohne Active Body Control).

Interview mit Frank-Werner Mohn, ESP Pionier
„Der Zug hat gerade erst Fahrt aufgenommen“
Frank-Werner Mohn ist einer der Väter des ESP Systems – auf einer Dienstreise nach Schweden kam ihm die entscheidende Idee. Nach seinem Maschinenbau-Studium an der RWTH Aachen begann er seinen Berufsweg 1982 bei Daimler. 1987 wechselte er von der Motorenentwicklung zur Messgruppe, zuständig unter anderem für die Druckzumessung des seinerzeit brandneuen ABS Systems. Heute ist der 57-jährige Diplom-Ingenieur bei Mercedes-Benz im Bereich Fahrassistenzsysteme tätig. Zudem hält er Vorlesungen zu Fahrzeugbau und Fahrdynamik an der Hochschule Mannheim.
Herr Mohn, Auslöser für die Erfindung von ESP war ein Unfall in Schweden. Aber nicht jener, an den jetzt alle denken…
Mohn (lacht): Genau, ich habe sogar noch alle Unterlagen der damaligen Spesenabrechnung aufbewahrt. Sehen Sie: „Bergungshilfe“ hieß das damals, 485 schwedische Kronen kostete die Abschleppaktion. Auf dem Weg zu Testfahrten in Nordschweden bin ich am 29. Januar 1989 im Graben gelandet. Nachts war es sehr kalt gewesen, dann schien die Sonne, und entsprechend spiegelglatt war mittags die Straße. Ich war in einem 124er Mercedes 300 E-24 unterwegs, spielte mit dem Gas, das Heck brach aus und irgendwann steckten wir in einem Schneewall in der Nähe von Strömsund fest. Natürlich passierte das auch noch an einer Stelle, an der das gesamte Testteam meinen Ausritt mitbekommen musste…
War das nicht peinlich als junger Ingenieur?
Mohn: So sehr, dass ich die nächsten Nächte nicht schlafen konnte, sondern gegrübelt habe, wie sich so etwas vermeiden ließe. Offenbar waren die Seitenführungskräfte vorne zu groß und hinten zu klein gewesen.
Das war sozusagen die Geburtsstunde von ESP?
Mohn: Ja. So kam ich auf eine Zwangsbremsung als Stabilisierungsidee.
Wie ging es weiter?
Mohn: Meinen damaligen Hauptabteilungsleiter Professor Adam Zomotor konnte ich von der Vision überzeugen. Im April 1989 übernahm ich eine neue Aufgabe, die Verifikation von Fahrzeugmodellen, bekam mit Thomas Wohland einen jungen Ingenieur als Mitarbeiter – und wir haben die Idee inoffiziell weiterverfolgt. Zunächst haben wir ein mathematisches Modell zur Momentenberechnung entwickelt, mit dem wir die drei Fahrzustände übersteuernd, neutral und untersteuernd darstellen konnten.
Ganz ohne Hardware wird es aber nicht gegangen sein?
Mohn: Nein, die nötigen Bauteile haben wir uns bei Kollegen auf dem kurzen Dienstweg besorgt… (schmunzelt). Sie dürfen auch nicht vergessen: ABS ist damals noch mit zwei Drehzahlfühlern vorne und einem hinten ausgekommen. Wir brauchten die Sensorik aber an beiden Hinterrädern und haben das eben entsprechend zusammengebastelt. Später ging es um die Drehung um die Fahrzeug-Hochachse – da brachte uns ein Gyrosensor aus einem Modellbau-Helikopter auf die richtige Idee… Schließlich waren wir irgendwann im Winter 1990 soweit und hatten ein funktionsfähiges Fahrzeug aufgebaut. An Bord war eine ampelähnliche Anzeige mit drei Lämpchen, je nach Fahrzustand blinkte die entsprechende Lampe auf.
Nach zwei Jahren Undercover-Vorentwicklung war im Frühjahr 1991 dann Showdown?
Mohn: Ja, auf einer Leistungsschau der Entwickler in Arjeplog/Schweden durften wir unseren Prototypen, einen unauffälligen mausgrauen 124er, vorführen. Mit bei den Testfahrten war ein Kollege aus der Getriebeentwicklung, der als sehr vorsichtiger und eher langsamer Fahrer galt. Mit unserem selbststabilisierenden Fahrzeug zog er auf einmal nahezu genauso zügig um den gefrorenen See wie die anderen – seine Begeisterung hat wohl auch dazu beigetragen, dass dann die Serienentwicklung losging…
Zusammen mit Bosch?
Mohn: Ja, 1992 startete die Serienentwicklung. Über 40 Ingenieure von Mercedes‑Benz und Bosch, darunter mit Anton van Zanten ein weiterer Vater des ESP® arbeiteten an dem Projekt und bauten im Wettstreit Autos auf. Ich bin damals aber in der Vorentwicklung geblieben.
1995 kam dann der Mercedes S 600 als erstes Modell mit serienmäßigem ESP auf den Markt. Ist heute, 20 Jahre später, das Thema ESP ausgereizt?
Mohn: Nein, die Weiterentwicklung über die Jahre war rasant und stoppt auch jetzt nicht. Ich denke: Der Zug hat gerade erst Fahrt aufgenommen. Es gibt noch so viele Möglichkeiten: von der Vernetzung mit anderen Sicherheitssystemen, wie wir das heute schon mit „Intelligent Drive“ machen, bis hin zur Kopplung mit den Informationen aus anderen Autos bei der Car-to-x-Technologie…
(Quelle: Daimler AG, „20 Jahre ESP„)
Schreibe einen Kommentar
Du musst angemeldet sein, um einen Kommentar abzugeben.